Human-Robot Interaction and Human-in-the-Loop
Human-Robot Interaction (HRI) explores how people and robots communicate, collaborate, and coexist; from a robot that assists a surgeon in the operating room to a mobile platform navigating a busy hospital corridor alongside staff and patients. Human-in-the-Loop (HITL) systems extend this by keeping a human actively involved in the robot’s decision-making process, ensuring that autonomy is augmented rather than replaced.
Why HRI Matters
Robots have the potential to be deployed in environments shared with people: homes, hospitals, warehouses, schools, and public spaces. The challenge is not merely technical, it is about building trust, legibility, and safety into the interaction. A robot that moves efficiently but unpredictably is not a safe collaborator; one that communicates intent clearly and adapts to human cues is.
Our interest lies in understanding what makes an interaction effective: how robots should represent human intentions, when they should ask for help, how they should signal uncertainty, and how the interface between human and machine should be designed to keep the human meaningfully in control.
Human-in-the-Loop Planning and Control
Classical autonomous systems are designed to minimise the need for human input. HITL systems take the opposite view: human judgement is a resource to be used, not a bottleneck to be eliminated. In manipulation and planning contexts this means designing systems where:
- A human operator can intervene, correct, or redirect the robot at any point in a task.
- The robot can recognise when its own uncertainty is high and actively request guidance rather than committing to a potentially wrong action.
- Corrections provided by a human are incorporated online, without requiring a full re-plan from scratch.
This is especially relevant in safety-critical applications, assistive robotics for motor-impaired users, surgical assistance, and autonomous vehicles, where a wrong autonomous decision can have serious consequences.
Shared Autonomy
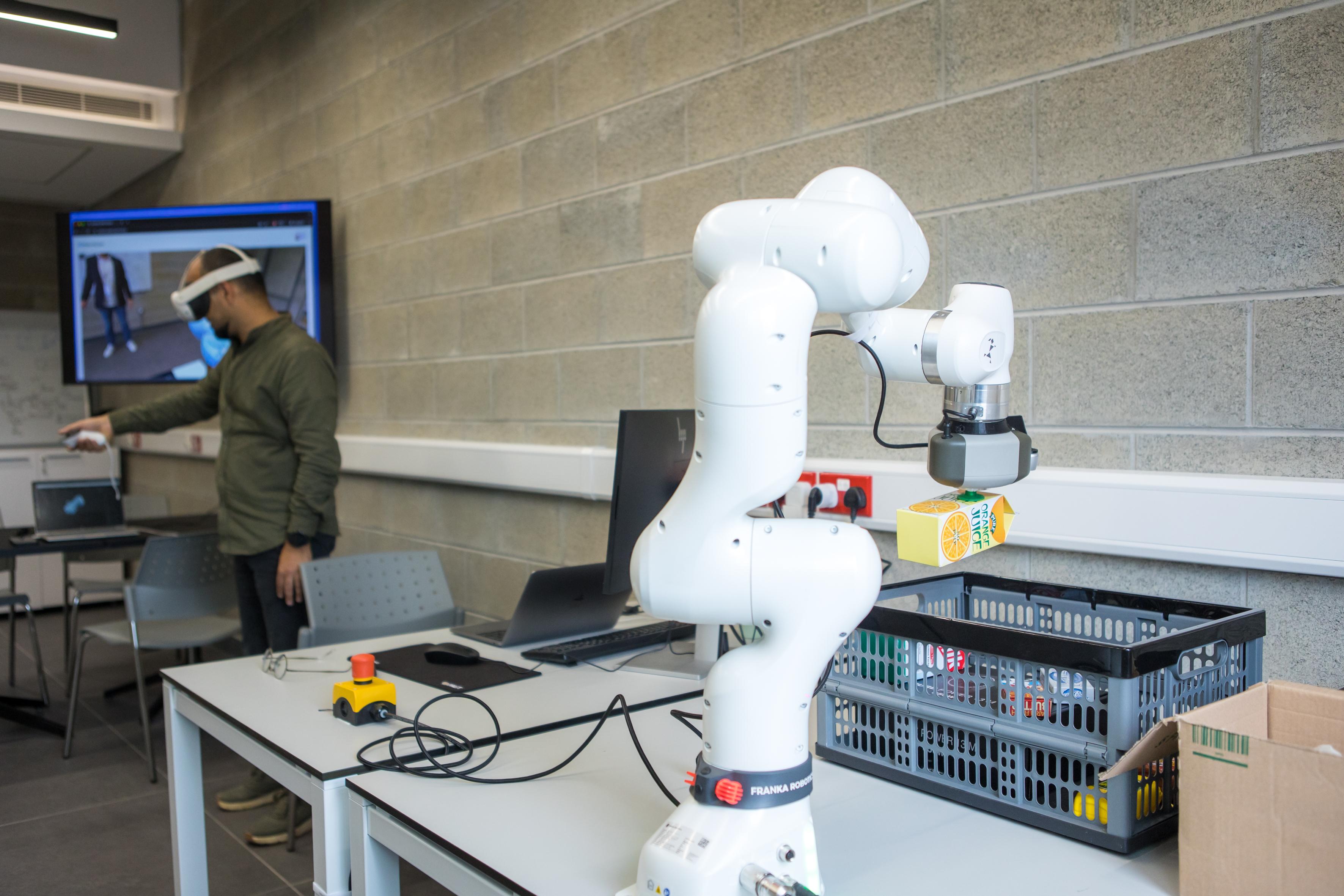
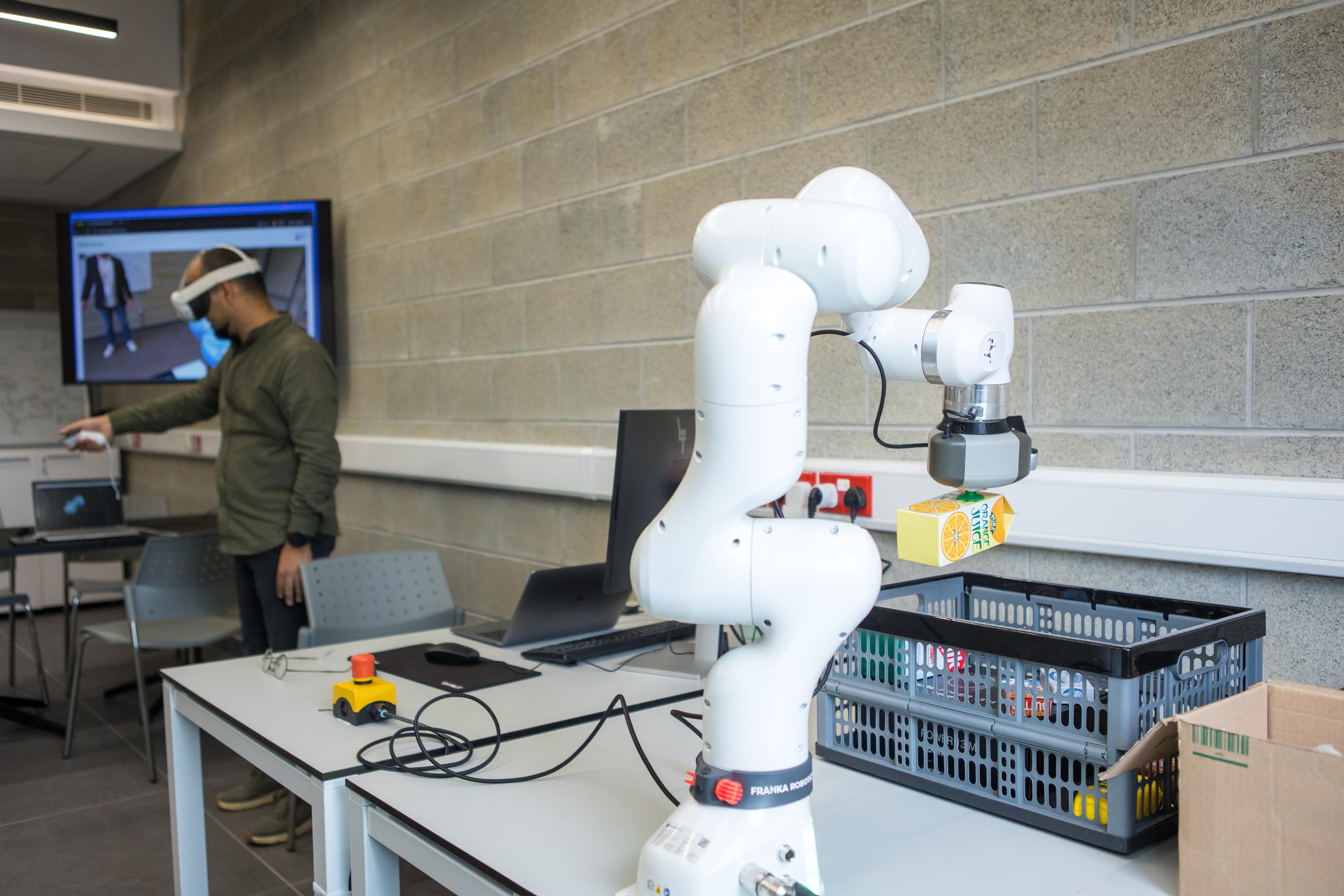
Shared autonomy sits at the intersection of teleoperation and full autonomy. The robot infers the human’s goal from partial observations (joystick inputs, gaze, gesture, AR/VR headset, or speech) and blends its own motion plans with the human’s commands to produce a smooth, goal-directed action. The challenge is designing the blending policy: how much should the robot correct or assist, and when should it yield to the operator’s intent even if that intent appears suboptimal?
We are interested in learned and model-based approaches to shared autonomy that remain transparent to the user and gracefully handle ambiguous or conflicting signals.
Intent Recognition and Anticipatory Behaviour
Effective HRI requires that the robot understand what a person is about to do, not merely what they are doing right now. Anticipatory behaviour, moving to a position that will be useful moments later, or clearing an obstacle before the person reaches it, dramatically reduces the cognitive load on human collaborators.
Legibility and Communicative Motion
A robot’s motion carries information. Trajectories that are legible, that make the robot’s goal obvious to an observer, build trust and reduce unexpected conflicts in shared workspaces. We are interested in planning methods that explicitly trade off task efficiency against communicative clarity, generating motion that is both capable and interpretable.